Backstepping
Summary of Backstepping
Backstepping
Backstepping은 시스템을 작은 단위로 쪼개어 단계별로 Lyapunov function을 구축해 나가는 Recursive 설계 기법이다. 이 방법은 시스템을 여러개의 Subsystems 로 나눠 단계적으로 controller 를 설계하고, 최종적으로 전체 시스템을 안정화하는 Explicit control law를 도출한다.
이 말은 곧,
Backstepping 조건
모든 시스템에 적용할 수 없고, 반드시 Strict feedback form을 가진 nonlinear system 이어야한다
Scope; Strict feedback form
상태 공간 모델이 다음과 같은 구조를 가질때를 말한다.
- \[\dot{x_1} = f_1 (x) + g_1(x_1)x_2\]
- \[\dot{x_2} = f_2(x_1, x_2) + g_2(x_1, x_2)x_3\]
- …
- \[\dot{x_i} = f_i(x_1, ... , x_i) + g_i(x_1, ..., x_i)x_{i+1}\]
- …
- \[\dot{x_n} = f_n(x_1, ..., x_n) + g_n(x_1, ..., x_n)u\]
- 단, \(f_i(0)=0\) 이며, 모든 \(i\) 에 대해 \(g_i(x_1, ..., x_i) \neq 0\) 이어야한다
이 구조의 핵심은 각 Subsystem 의 상태 변수 \(x_{i+1}\) 이 바로 이전 단계의 Pseudo control variable 로 작동한다는 점이댜.
Idea & Procedure
Backstepping 은 각 Subsystem 에 대해 Virtual controller (\(\alpha_i\)) 를 재귀적으로 설계하는 과정이다.
Procedure
각 Subsystem 에 대해 Virtual controller \(\alpha_i\) 를 설계한다.
실제 state variable \(x_i\) 와, 설계된 가상 제어기 \(\alpha_{i-1}\) 사이의 오차를 나타내는 새로운 state variable \(z_i\) 를 도입한다.
Lyapunov-based controller design (e.g., Dynamic inversion) 을 통해 각 단계에서 안정성을 보장한다.
1. State Transformation
실재 state variable \(x_i\) 와 우리가 설계한 이상적인 가상의 제어값(\(\alpha_{i-1}\)) 사이의오차를 나타내는새로운 변수 \(z_i\) 를 다음과 같이 정의한다.
- \[z_1 := x_1\]
- \[z_2 := x_2 - \alpha_1(z_1)\]
- \[z_i := x_i - \alpha_{i-1}(z_1, ... , z_{i-1})\]
2. Lyapunov Function
각 단계마다 Partial Lyapunov function 을 누적해서 정의한다.
- \[V_1 = \frac{1}{2}z_1^2\]
- \[V_i = V_{i-1} + \frac{1}{2}z_i^2\]
- Final Step: \(V_n = \frac{1}{2} \sum^n_{i=1} z_i^2\)
3. Step by Step
- Step 1 : \(\dot{x_1}\) 식에서 \(x_2\) 를 제어의 입력으로 보고, \(\dot{V_1} \leq 0\) 을 만족시키는 Virtual controller \(x_2 = \alpha_1(z_1)\) 를 설계한다.
- Step \(i\) : \(x{i+1}\) 을 Pseudo control variable 로 사용해, \(\dot{V_i} \leq 0\) 이 되도록 \(\alpha_i (z_1, ..., z_i)\) 를 설계한다.
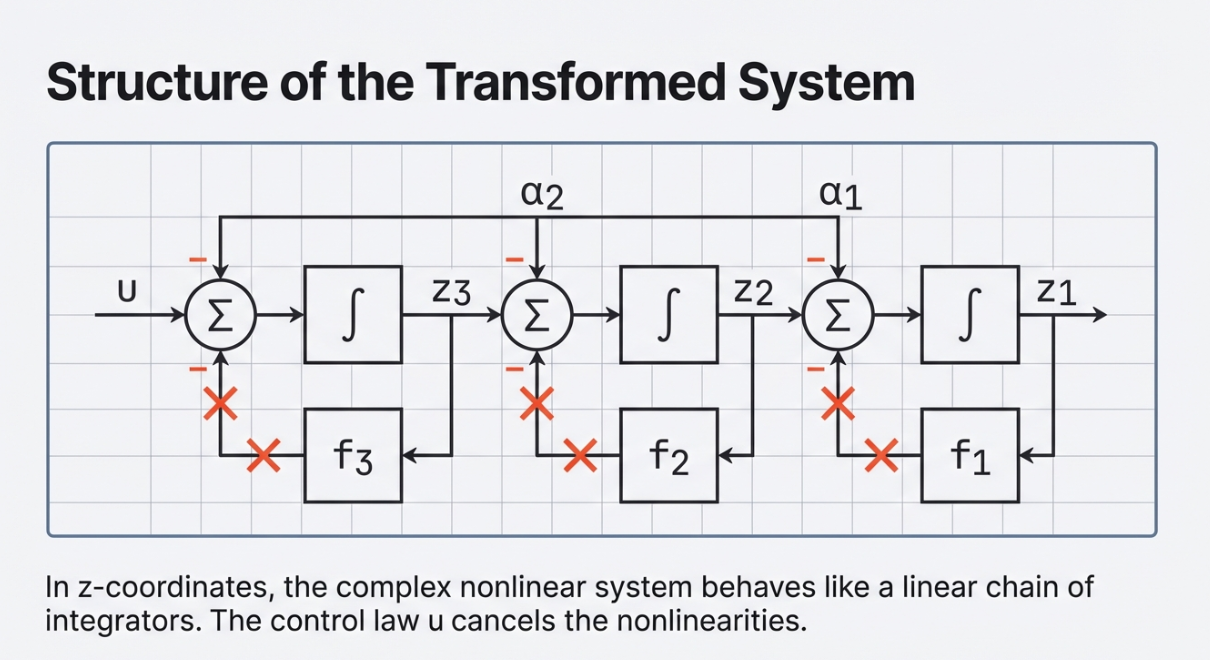
- Step \(n\) : 실제 제어 입력 \(u\) 가 나타나는 단계로, \(u = \tilde{u}(z_1, ..., z_n)\) 을 결정한 후, 다시 원래의 좌표 \(x\) 로 Transform back 해서 최종 제어 법칙 \(u(x_1, ..., x_n)\) 을 얻는다.
Example
3rd- Order System 이 다음과 같다.
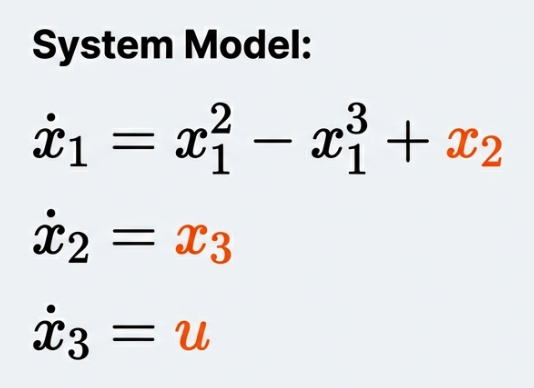
- Objective : Global stabilization of the origin \(x=0\).
- Strategy :
- Use \(x_2\) to stabilize \(x_1\)
- Use \(x_3\) to stabilize \(x_2\)
- Use \(u\) to stabilize \(x_3\)
Step 1
For \(V_1 = \frac{1}{2} z_1^2, \dot{V_1} = z_1(z_1^2 - z_1^3 + x_2)\) -> \(x_2\) 의 목표값이 virtual controller \(\alpha_1 = z_1^3 - z_1^2 - z_1\) 로 선택하면, \(\dot{V_1} = -z_1^2\) 이 되어 안정화된다.
Step 2
After adding \(z_2 = x_1 - \alpha_1\), V_2 = V_1 + \frac{1}{2}z_2^2\(->\)\dot{V_2} = -z_1^2 + z_2(x_3 +z_1 - (3 z_1^2 - 2z_1 -1)(z_2 - z_1))\(이며, 이를 안정화하는\)\alpha_2 = -z_1 - z_2 + (3 z_1^2 - 2z_1 -1)(z_2 - z_1)$$ 를 설계한다.
Step 3
마지막으로 실제 입력 \(u\) 를 포함한 \(\dot{V_3}\) 을 분석.
Robust Backstepping and ISS
실제 시스템에는 외부 Disturbance(\(\delta\))가 존재할 수 있다. Robust Backstepping 은 이런 불확실성에도 시스템의 안정성을 보장한다.
Input-to-State Stability (ISS)
bounded Disturbance(\(\lvert \delta \rvert \leq \delta_{max}\)) 가 존재할때, 상태 \(z\) 가 무한히 커지지 않고 특정 영역 (\(\rho(\delta_{max})\)) 내에 머무르게한다.
E.g.
System \(\dot{V_2} \leq - k_0 (z_1^2 + z_2^2) + \frac{\delta^2}{2}\) 같은 부등식을 유도하면서 Lyapunov function 이 특정 반경 밖에서는 항상 감소함을 증명해 ISS 성질을 확보한다.