Flatness
Summary of Flatness
들어가기 전에… 왜 비선형 시스템은 이렇게 어려울까?
How can we design controllers that are exact, predictable, and robust over a wide operating range without the limitations of local approximations?
크게 3가지 정도로 특징을 뽑을 수 있는데 - Complex dynamics, local vs. galobal validity, hidden internal dynamics 정도로 볼 수 있다. 간단하게 말하면 비정형적인 행동양상과, 유효한 범위의 문제와, 그 밖의 노이즈 등에 의해 컨트롤하기 어렵다 - 이다.
그럼 여기서 우리는 이런 질문을 할 수 있다. 만약에 그런 모든 것을 다 설명할 수 있는 어떤 임의의 무언가를 찾으면?
이 질문의 답이 바로 Flat!
Flatness
Flatness는 non-linear system이 적절한 coordinate transformation을 통해 선형공간에서의 linear system으로 표현될 수 있다는 개념에서 출발하고, 특히 시스템의 Controllability(가도달성)과 Trajectory Planning(궤적 계획)과 밀접한 관련이 있다.
약간 추상명사처럼 모든 조건을 다 만족할때를 표현한 임의의 세계이다.
Flat Systems
Flatness Definition
어떤 시스템 \(\dot{x} = f(x, u)\) 와 출력 \(y = \Psi_y (x, u, \dot{u}, ..., u^{(\alpha)})\) 에 대해 \(\text{dim}(y) = \text{dim}(u)\) 를 만족할때, 다음의 유일한 표현식이 존재하면 이 시스템을 Differentially Flat하다고 정의한다.
- State Variables : \(x = \left( y, \dot{y}, ... , y^{(\gamma - 1)} \right)\)
- Input Variables : \(u = \Psi_u \left( y, \dot{y}, ... , y^{(\gamma)} \right)\)
여기서 \(\alpha\) 와 \(\gamma\) 는 유한한 미분 횟수를 의미한다. 시스템의 모든 변수가 Flat Output \(y\) 에 의해 결정되기때문에, 이를 시스템이 \(y\) 에 의해 Parameterized 되었다고 한다.
Flatness
The system \(\dot{x} = f(x, u)\) with output \(y= \Psi_y (x, u, \dot{u}, ..., u^{(\alpha)})\) and \(\text{dim}(y) = \text{dim}(y)\) is flat, if the following unique representations of $x$ and $u$ exist:
- \[x = \Psi_x \left( y, \dot{y}, ... , y^{(\gamma - 1)} \right)\]
- \[u = \Psi_u \left( y, \dot{y}, ... , y^{(\gamma)} \right)\]
with \(\alpha, \gamma < \infty\) (finite numbers of derivatives).
\(\rightarrow\) The output \(y\) is then called a flat output.
Eigenschaften
- Controllability and Reachability : 모든 Flat System은 두 가지를 모두 가진다.
- Linearization : 이런 시스템은 Static 또는 Dynamic State Feedback을 통해 항상 선형화 될 수 있다.
- Equilibria Analysis : 평형점(EP) \(x^*, u^*\) 를 구할 때, 복잡한 방정식을 풀 필요 없이, \(y = y*\) 이고, 그 이상의 미분항이 0이라는 조건만으로 \(x^* = \tilde{\Psi}_1(y^*), u^* = \tilde{\Psi}_2(y^*)\) 와 같이 쉽게 파라미터화 할 수 있다.
Flatness Analysis - 시스템 분석 및 출력 결정
시스템이 flat한지 판단하는 일반적인 필요충분조건은 아직 없다(!). 하지만 주로 Heuristic 기법을 사용한다. (사실 휴리스틱은 그냥 어찌저찌해서 노가다해보니 뭔가 맞았다 의 느낌이 강하다. 경험치느낌쓰)
How to select and validate Flat Output Candidate
- 시스템의 dynamic behavior에 대해 가장 많은 정보를 담고 있는 물리적인 변수를 Flat Output 의 후보 $y$로 선택한다.
- 후보 $y$를 시간에 대해 계속 미분해서, 상태/State $x_j$ 와 입력 $u_i$ 를 $y$ 와 그 미분항들로만 구성된 non-linear 방정식으로 유도한다.
- 입력 $u$ 가 나타나기 전까지 미분을 많이 수행할 수 있는 output이 좋은 후보이다.
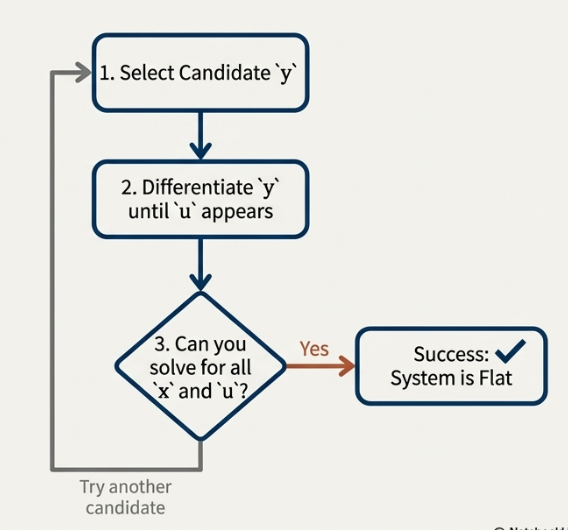
A Heurictic Procedure
1. Select a Candidate $y$ : Choose a potential output that seems to capture the essential motion or information of the system. \(dim(y) = dim(u)\)
2. Differentiate Successively : Calculate the time derivatives \(\dot{y}, \ddot{y}, ...\) using the system’s state euqtions \(\dot{x} = f(x, u)\).
3. Check for Invertibility : At each step, check if the resulting system of algebraic equations can be inverted to express all states \(x\) and inputs \(u\) in terms of \(y\) and its derivatives alone.
4. Confirm : If all states and inputs can be uniquely determined, the candidate \(y\) is a flat output.
###
실제 시스템에서 Flat Output 을 어떻게 설정하고, 이걸 가지고 시스템의 State, Input을 어떻게 parameterization 하는지 케이스를 통해 알아보자.
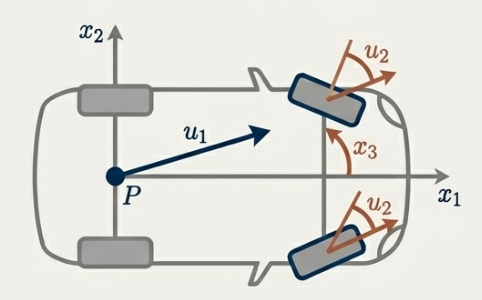
다음은 두 개의 차축을 가진 차(Two axle vehicle)이다. 이 시스템을 모델링 해보자.
State equations
State
\[\dot{x_1} = u_1 \ cos \ x_3\] \[\dot{x_2} = u_1 \ sin \ x_3\] \[\dot{x_3} = u_1 \ tan \ x_3\]Variables
\((x_1, x_2)\) : 차의 뒷축 중심점 \(P\) 의 좌표
\(x_3\) : 차의 방향
\(u_1\) : 차의 속도
\(u_2\) : 차의 Steering angle
Selection of Flat Output
Flatness Analysis 의 핵심은 시스템의 모든(!) 정보를 담고 있는 출력 \(y\) 를 찾는것이다. 여기서는 뒷축 중심점 \(P\) 의 좌표를 Flat Output 후보로 선택한다.
\[y = [x_1, x_2]^T\]Verfication - Derivation and Parameterization
선택한 \(y\) 가 Flat output인지 확인하기 위해, \(y\) 를 시간에 대해 미분해서 State \(x\), Input \(u\) 의 \(y\) 의 미분항들로 표현한다.
1st Derivate \(\dot{y}\)
\[\dot{y_1} = \dot{x_1} = u_1 \ cos \ x_3\] \[\dot{y_2} = \dot{x_2} = u_1 sin \ x_3\]이 식으로부터 방향 \(x_3 = \text{arctan} \frac{\dot{y_2}}{\dot{y_1}}\) 을 구할 수 있고, 속도 \(u_1 = \frac{\dot{y_1}}{\dot{y_1}}\) 도 \(y\) 의 미분으로 표현할수 있다.
2nd Derivate \(\dot{y}\)
\(\dot{y_1}\) 와 \(\ddot{y_2}\) 를 구하는 과정에서 Steering angle \(u_2\) 과 input의 미분 \(\dot{u_1}\) 이 나오며, 결과적으로 이렇게 했을때, 모든 상태 변수와 입력 변수를 \(y, \dot{y}, \ddot{y}\) 의 함수로 유일하게 나타낼 수 있다.
Analysis Conclusion
- 상태 \(x\) 와 입력 \(u\) 가 \(y\) 와 그 미분항(\(\gamma = 2\) 차까지)으로 완전히 결정되고, 이 시스템은 differentially flat하며 \(y = [x_1, x_2]^T\) 는 유효한 Flat Output 이다.
- 이렇게 전개된 관계식은 \(\dot{y_1} = 0\) 인 지점과 같은 특정 Singulairites를 제외한 영역에서 locally valid 하다.
하지만 이런 일련의 과정들이 매우복잡한 계산일 수 있어서 여러 프로그램을 사용한다. MATHEMATICA, MAPLE, … etc
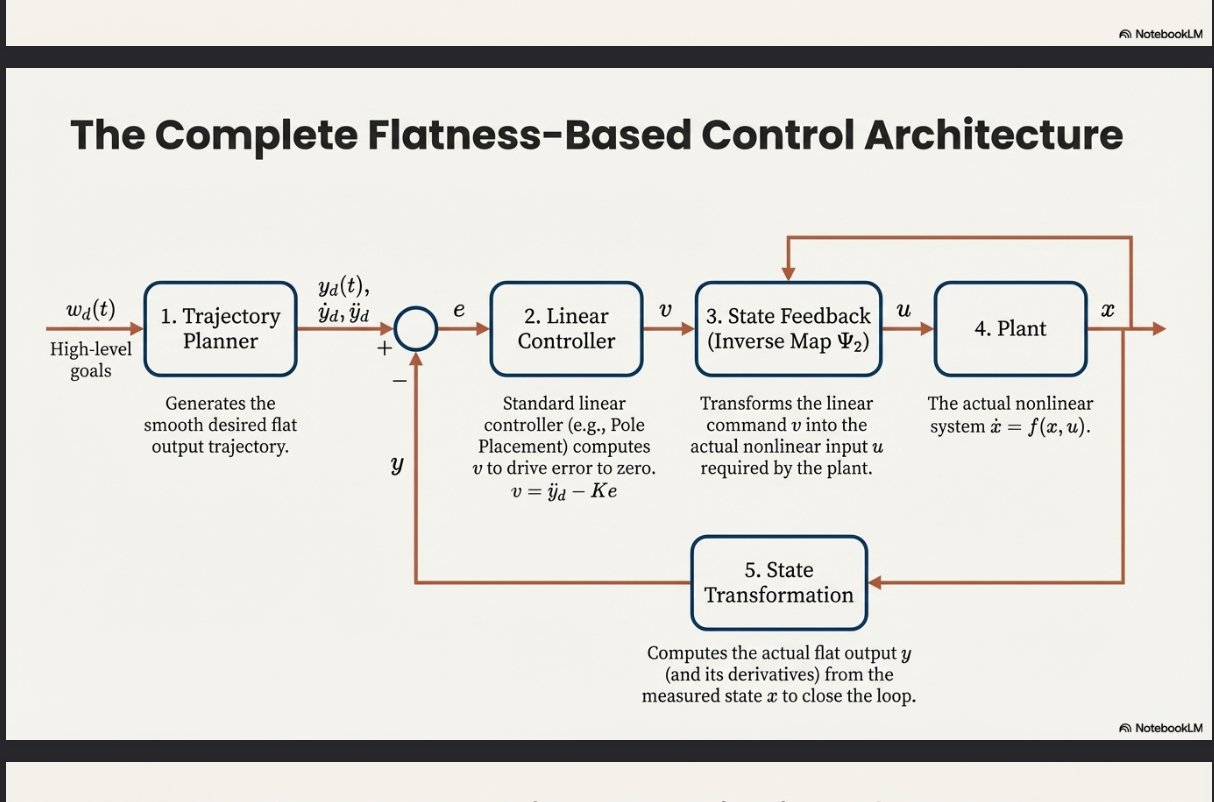
Flatness-Based Feedforward Control - 개루프 궤적 추종 제어
한국어로 쓰니까 너무 어렵네..
암튼 시스템이 flat 하다면, target trajectory \(y_d (t)\) 를 트래킹하기 위한 입력을 Inverse System 을 통해 직접 계산할 수 있다.
Target Trajectory Generation - 3 Types
Control input 을 설계하기 전에, target trajectory 를 생성해야 되고, source에서는 이를 다음 3가지로 분류한다.
- Case 1: target trajectory \(y_d (t)\) 자체가 충분히 미분 가능한 형태로 주어지는 경우.
- Case 2: target trajectory 가 \(y\) 가 아닌 다른 제어 변수 \(w_d (t)\) 에 대해 주어지는 경우 (-> 이 경우는 수치적인 적분이 필요하다)
- Case 3: initial state \(x_d(0)\), final state \(x_d(t_f)\) 만 주어지고, 그 사이를 곡선 등으로 연결하는 경우.
Case 1 - Flat Output에 대한 직접적인 정의
target trajectory \(y_d(t), t \in [0, t_f]\) 가 flat output 자체에 대해 충분히 미분 가능한 시간 함수로 주어지는 경우이다. 이 경우, 아래 관계식을 통해 제어 함수 \(u_d (t)\) 를 즉시 결정할 수 있다. (쉬운편)
\[u = \Psi_2 (y, \dot{y}, \ddot{y}, ... y^{(\gamma)})\]Case 2 - w.r.t. \(w_d(t)\)
target trajectory 가 float output 이 아닌 다른 제어변수 \(w_d (t) = \eta (x)\) 로 정의 되는 경우이다. 단 \(\text{dim}(w) = m\) 이다. 이때 \(w\) 와 \(y\) 의 관계인
\[w_d = \eta (\Psi_1 (y_d, \dot{y_d}, ..., y_d^{(\gamma - 1)}))\]로 부터 \(y_d\) 에 대한 Implicit Differential Equation 을 유도하게 된다. 이 방정식은 numerical integration 을 통해 풀고, \(y_d\) 를 구하는 것이 목적이 됨.
Case 3 - value only initial and final state
target trajectory 가 initial state \(x_d (0)\) 와 final state \(x_d(t_f)\) 로만 정의된 경우이다. 이때 이 상태값들을 flat output 으로 변환하면 \(y_d (0)\) , \(y_d(t_f)\) 를 계산할 수 있다. 그리고 그 사이를 충분히 미분 가능한 곡선인 Splines or Polynomials 등으로 부드러운 곡선을 사용해 연결해서 trajectory 를 만든다.
이 파트는 이론적인것보다 문제를 몇 가지 풀어보는게 더 나을듯하다.
Control Law Generation - 제어법칙의 도출 및 구조
위의 3가지 케이스 중 하나로 어찌저찌 target trajectory \(y_d (t)\) 를 구했다고 가정한다. 그 다음엔 시스템의 모든 변수를 이 trajectory 와 그 미분항들로 parameterized 가능하다.
State and Input
\[x_d = \Psi_1 (y_d(t), \dot{y_d}(t), ..., y^{(\gamma - 1)_d})\] \[y_d = \Psi_2 (y_d(t), \dot{y_d}(t), ..., y^{(\gamma)_d})\]
그 다음 계산된 \(u_d (t)\) 를 Open Loop 형태로 시스템에 직접 넣는다. 이는 inverse system 을 통해 원하는 출력(output) 으로부터 입력(input) 을 뽑아내, 실제 시스템에 넣어주는 구조이다.
limitations…
단, 다음 전제 조건이 충족되어야함.
- 제어할 System 이 Stable 해야함
- Initial values 를 정확히 알고 있어야, 오차 없이 trajectory 따라갈 수 있음
- Disturbances 가 매우 작아야 함. 노이즈가 크면 feedforward 만드로는 한계가 있음. 이 경우, feedback control 을 해야하는데, 이것은 다음 포스팅에 !