Passivity
Summary of Passivity
Passivity
Passivity는 시스템의 안정성 분석과 복잡한 non-linear 시스템의 컨트롤러 설계를 위한 도구로, 시스템을 에너지 보존, 소산의 관점에서 해석한다.
Dissipativity와 Passivity는 시스템의 입력과 출력 사이의 관계를 Storage Function \(V(x)\)과 Supply Rate \(s(u, y)\)를 통해 설명하는 성질이다.
Generalized Energy Balance and Supply Rate
시스템 $S: \dot{x} = f(x,u), \ y=h(x,u)$에 대해 에너지는 다음처럼 보존된다.
\[\int_0^t s(u,y) d\tau + V(x(0)) = \int_0^t g(\tau) d\tau + V(x(t))\]이 식은 [순수 에너지 유입] + [초기 저장 에너지] = [손실 에너지] + [현재 저장 에너지] 라는 물리적 보존 법칙을 의미한다.
| Symbol | Name | Desc |
|---|---|---|
| \(s(u,y)\) | Supply Rate | 유입되는 에너지 비율 |
| \(V(x)\) | Storage Function | 시스템 내 부에 저장된 에너지 |
| \(g(\tau)\) | Dissipated Energy | 손실된 에너지; (마찰이나 저항에 의해) |
Definition of Dissipativity
시스템 $S$가 psdf한 Storage function $V(x)$와 Supply Rate $s$에 대해 다음 중 하나를 만족하면 Dissipative라고 한다:
Integral Form
\[\int^t_0 s(u, y) d\tau + V(x(0)) \geq V(x(t))\]
유입된 에너지와 처음 있던 에너지의 합은 항상 현재 저장된 에너지보다 크거나 같다. (에너지가 스스로 생겨날 수 없으니까)
Differential Form
\[s(u, y) \geq \dot{V}(x)\]
단위 시간당 들어오는 에너지량(\(s\))은 시스템 내부 에너지 변화량(\(\dot{V}\))보다 항상 크거나 같아야 함.
Definition of Passivity
Passivity
Supply Rate가 입력과 출력의 내적인 \(s(u,y) = y^T u\)인 특수한 경우이다. 수식 조건을 보면 다음과 같다.
Integral Form
\[\int^t_0 y^T u d\tau + V(x(0)) \geq V(x(t))\]Differential Form
\[y^Tu \geq \dot{V}(x(t))\]
Lossless (무손실)
에너지가 외부로 전혀 새나가지 않는 상태로 \(\dot{V}(x(t)) = y^T u\)를 만족한다. (현실세계에서는 불가능)
State Strict Passivity
에너지 손실이 시스템의 상태 $x$에 의존하는 경우로, Positive Definite Function(pdf) \(\Psi(x)\)에 대해 \(y^T u \geq \dot{V}(x(t)) + \Psi(x)\)를 만족한다.
Output Strict Passivity
에너지 손실이 출력\(y\)에 의존하는 경우로, \(y^T \rho (y) > 0\)인 함수 \(\rho(y)\)에대해, \(y^T u \geq \dot{V}(x(t)) + y^T \rho(y)\)를 만족한다.
Synthesis of a Complex Passive System
Passive System들은 서로 결합되어도 전체 시스템의 Passivity가 유지되는 아주 편리한 성질이 있다. 이 성질은 우리가 Controller를 설계할때 병렬 결합, 피드백 결합 등이 가능하다는 것.
Parallel Interconnection
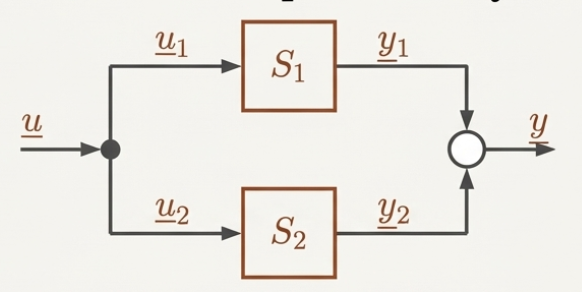
For two passive systems, $S_1$ and $S_2$, connected in parallel:
- Inputs & Outputs:
- \[u = u_1 = u_2\]
- \[y = y_1 + y_2\]
- Storage Function: The total stored energy is the sum of the individual energies
- \[V_{\text{total}}(x) = V_1(x_1) + V_2(x_2)\]
Proof Logic The total supply rate for the interconnected system is \(y^T u = (y_1 + y_2)^T u = y^T_1 u_1 + y^T_2\) Since each subsystem satisfies the passivity inequality, their sum does too, proving the overall system is passive
Feedback Interconnection
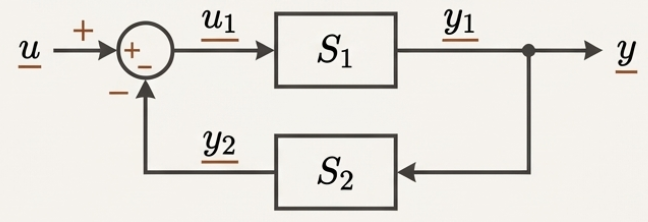
For two passive systems, $S_1$ and $S_2$, in a negative feedback loop:
- Inputs & Outputs:
- \[u = u_1 + y_2\]
- \[y = y_1 = u_2\]
- Storage Function: The total stored energy remains the sum of the parts.
- \[V_{\text{total}}(x) = V_1(x_1) + V_2(x_2)\]
Proof Logic The total supply rate is \(y^T u = y^T_1(u_1 + y_2) = y^T_1 u_ 1 + y^T_1 y_2 = y^T_1 u_1 + u^T_2 y_2\). The sum of individual supply rates again satisfies the passivity inequality for the composite system.
Passivity and Stability Properties
시스템이 에너지를 계속 소모한다는 것은 결국 움직임이 멈추고 안정한 평형점으로 수렴(!)한다는 것이다.
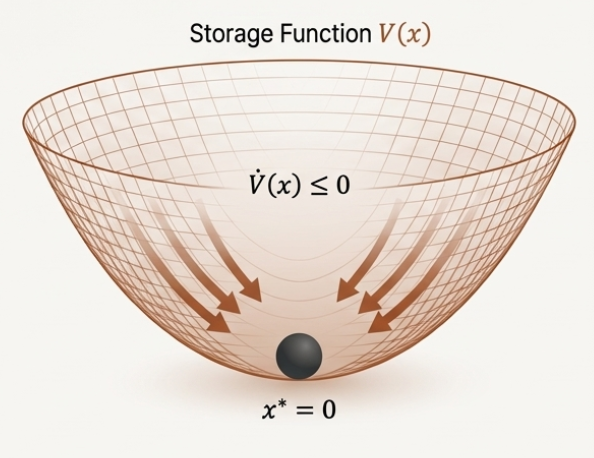
Passivity and Lyapunov Stability
시스템이 Passive하고, Storage Function $V(x)$가 pdf 이고, 연속 미분 가능하면, 입력이 없을떄($u=0$) 평형점 $x^{*} = 0$은 Lyapunov stable하다. 이는 에너지가 늘어나지 않으므로 상태가 발산하지 않고 일정 범위 내에 머무름을 보장한다.
Theorem
An equilibrium point \(x^* = 0\) of an unforced system ($u = 0$) is Lyapunov stable if:
a) the system is passive, and
b) \(V(x)\) is cont. diff and pdf
- The diff. passivity inequality: \(\dot{V}(x) \leq y^T u\)
- For the unforced system, we set the input \(u = 0\)
- The inequality simplifies to: \(\dot{V}(x) \leq 0\)
- pdf $V(x)$ with a nsdf derivative \(\dot{V}(x)\) is the definition of a Lypunov function that proves stability
Passivity-Based Regulation
시스템의 수동성 성질을 능동적으로 활용해서 시스템을 평형점으로 안정화하는 기법.
Zero-State Observability
입력이 0일때 ($u=0$), 출력이 계속 0 이면 ($y \equiv 0$) 반드시 시스템의 상태도 0이어야 한다. ($x(t) \equiv 0$). 즉 에너지가 소모되어 출력이 사라졌따면, 시스템의 내부 움직임도 완전히 멈춤을 보장한다.
Asymptotic Stability
단순한 안정성을 넘어 평형점으로 완전히 수렴하기 위해, 다음 중 하나를 만족해야한다.
Asymptotic stability requires strict energy disspation and observability
The equilibrium is asymptotically stable if any onf the following hold:
a) The system is state strictly passive.
- \(\dot{V}(x(t)) \leq y^T u - \Psi (x(t))\), where \(\Psi(\cdot)\) is pdf.
b) The system is output strictly passive AND zero-state observable.
- \(\dot{V}(x(t)) \leq y^T u - y^T \rho(y)\), where \(y^T \rho(y))\) is pdf
c) The system is passive, zero-state observable, \(V(x)\) is pdf, and \(\dot{V}(x)=0\) only if \(y=0\).
만약 $V(x)$가 Radially unbounded이면, 즉 $x$가 커질때 $V$도 무한히 커진다면, 이는 Global Aysmptotic Stability이다.
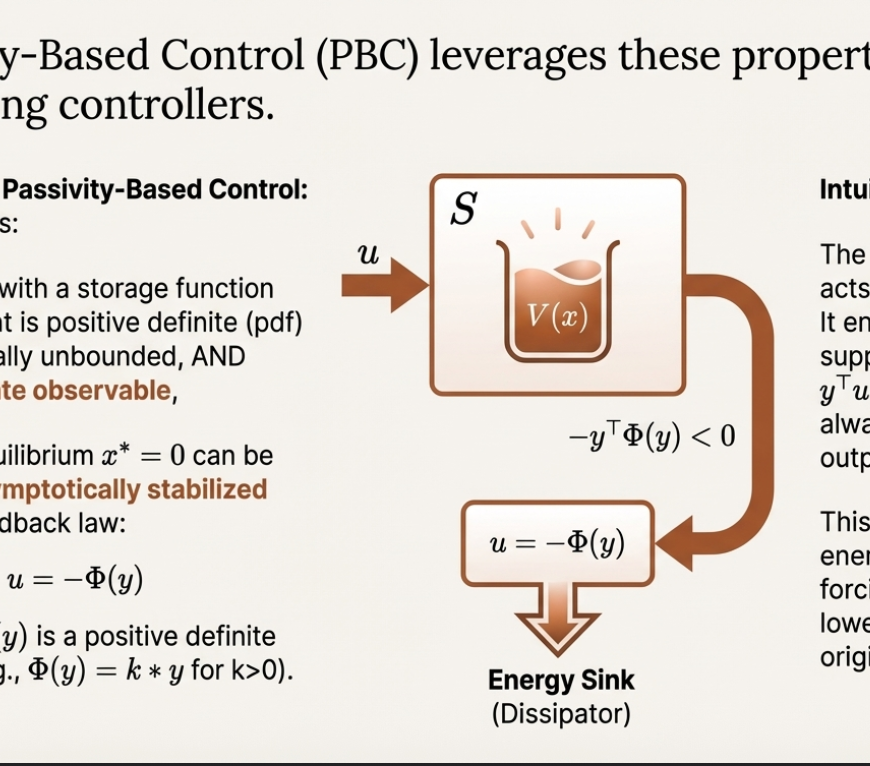
Principle of Passivity-Based Regulation
시스템이 passive하고 zero-state observable하며 $V(x)$가 pdf, radially unbounded인 경우, 다음과 같은 피드백 제어 법칙을 통해 평형점을 전역적으로 안정화 할 수 있다.
\[u = - \Phi(y) \text{ 단, } y^T \Phi(y) > 0 \text{ 인 pdf}\]이것은 시스템에 일종의 Damping(가상의 마찰)을 추가해서 에너지를 계속 뽑아내서 결국 멈추게 만드는 원리이다.
Feedback Passivation
본래 passive하지 않은 Control-Affien System (\(\dot{x} = f(x) + G(x)u\))를 제어기를 통해 passive하게 만드는 기법이다.
Strategy
- State Feedback \(u = \alpha(x) + \beta(x)v\)를 설계해서 시스템의 에너지 변화량(\(\dot{V}\))이 0이하가 되도록 만든다.
- 새로운 출력함수를 \(y = h(x) := [\frac{\partial V(x)}{\partial x} G(x)\beta(x)]^T\)로 정의해서, 새로운 입력 $v$와 출력 $y$ 사이의 관계를 passive 하게 바꾼다.