Sliding Mode
Summary of BaSliding Modeckstepping
Sliding Mode Control
Sliding Mode Control 은 불연속적인 Switching controller 를 이용해서 시스템의 상태를 특정한 평면으로 강제 유도하고, 그 위에서 미끄러지듯 움직이게 해서 목표 지점에 도달하게 하는 제어기법이다.
Sliding Mode Principle
System 은 대개 불확실성이나 disturbance \(d\) 를 포함하는 nonlinear 형태로 모델링한다.
\[\dot{x} = f(x, u) + d(x, t)\]그리고 Switching Manifold 가 정의되는데, 제어목표가 되는 상태 공간산의 평면/곡면이다. 그냥 goal 이라고 보면 됨.
\[S = \{ x \in \mathbb{R}^n \lvert s(x) = 0 \}\]결과적으로 우리의 목표는
Goal
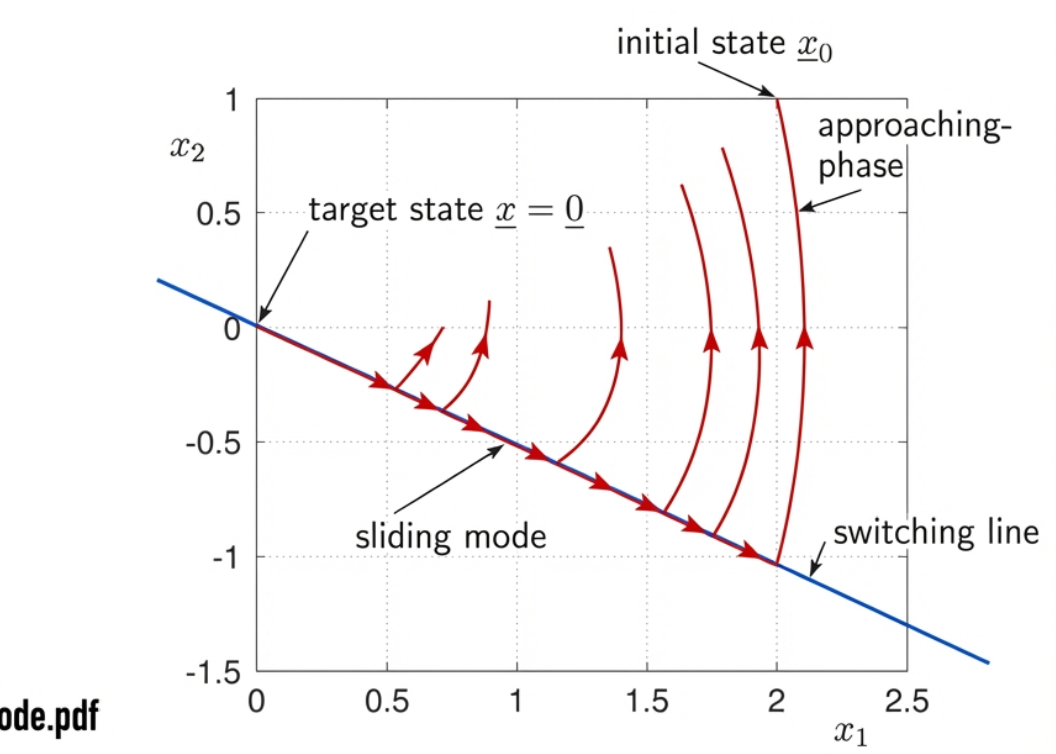
- 1. Approaching Phase : 임의의 초기 상태에서, Finite time 내에 Switching manifold 에 도달하게 한다.
- 2. Sliding Mode : 일단 평면에 도달하면, 그 위에서 벗어나지 않고 목표상태로 수렴한다.
Goal
Reach manifold \(S\) in finite time
Once reached, remain on manifold \(S\) ( thus, \(s(x)= 0\) )
General Structure
평면 \(s(x)\) 의 부호에 따라 제어 입력을 급격히 바꾸는 불연속 제어기 를 사용한다.
- \[u(x) = u^{+}(x) \text{ for } s(x) > 0\]
- \[u(x) = u^{-}(x) \text{ for } s(x) < 0\]
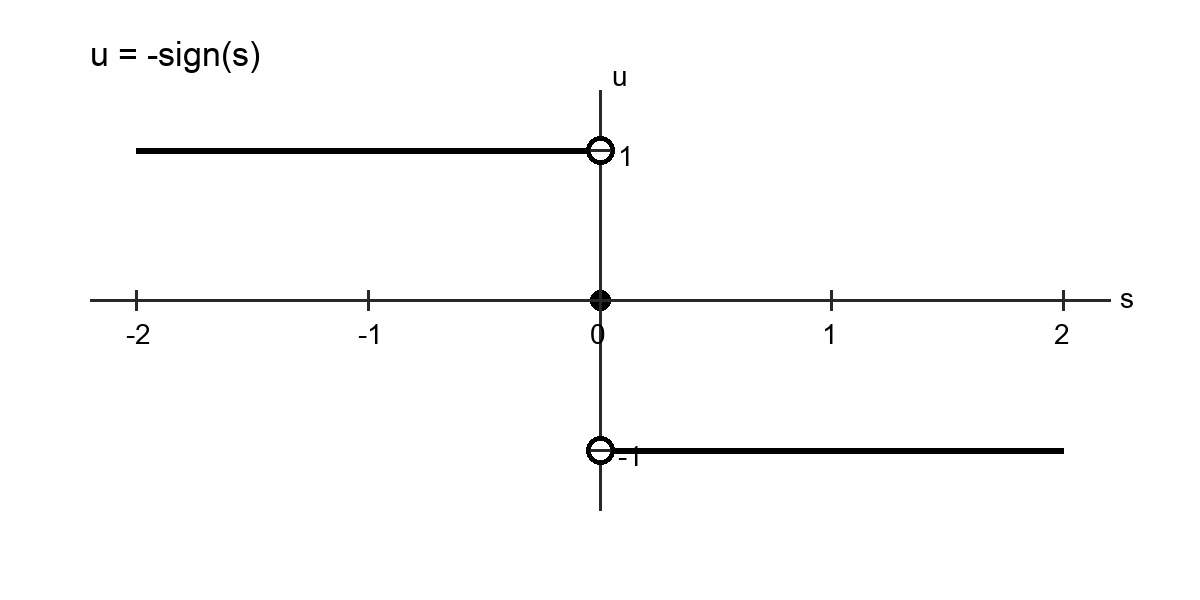
예시로, 가장 단순한 형태는 \(u = -sign(s(x))\) 같은 Signum functionm 이 있다.
Characteristics of Sliding Mode
Robustness : Disturbance \(d(x,t)\) 가 제어 입력과 같은채널을 통해 들어오는 Matching condition을 만족할 경우, 시스템은 모델 불확실성에 대해 매우 강인한 특성을 보인다.
Order Reduction : System 이 Sliding mode 에 진입하면, 시스템의 차수가 원래의 \(n\) 에서 \(n-m\) 으로 줄어드는 효과가 있다.
Chattering : 실제 하드웨어의 유한한 스위칭속도로 인해 평면 근처에서 발생하는 고주파 진동현상, actuator 의 마모를 유발할 수 있다.
Existence of Sliding Mode
For simplicity, let us consider \(s(\cdot) : \mathbb{R}^n \rightarrow \mathbb{R} \text{ and } u \in \mathbb{R}\)
우리는 \(S\) 가 finite time 에 도달함을 증명해야한다. 그러니까 여기서 Lyapunov function 의 개념이 다시 나온다. 즉,
For given \(s(x) \in \mathbb{R}\) , define Lyapunov function \(V = \frac{1}{2}s^2\). Then,
Option 1 : Check if \(\dot{V} = s \dot{s}\) is ndf AND \(s \dot{s} \leq - \eta \lvert s \rvert\) , for some \(\eta > 0\).
Option 2 : Check if \(\dot{V} = s\dot{s}\) is ndf AND local conditions:
| \(s \dot{s} < 0 \text{ for } s \neq 0\) | \(s < 0 \iff \dot{s} > 0\) |
| \(s > 0 \iff \dot{s} < 0\) | |
| Local conditions | \(\displaystyle{ \lim_{s \to 0^{-}} \dot{s} > 0 }\) |
| \(\displaystyle{ \lim_{s \to 0^{-}} \dot{s} < 0 }\) |
Stability of Ideal Sliding Mode
Ideal Sliding Mode 란, \(s=0\) AND \(\dot{s}=0\) 을 뜻한다. 이 상태에서 시스템이 어떻게 행동하는지를 분석하기 위해 두 가지 방법이 있다.
1. Filippov’s Method
평면 경계에서의 두 벡터 필드 \(f^{+} \text{ 와 } f^{-}\) 의 Convex hull 로 해를 정의한다.
\[\begin{aligned} \dot{x}_{fi} = \alpha f^{+}(x_{fi}) + (1 - \alpha)f^{-}(x_{fi}) \\ \\ 0 \leq \alpha \leq 1 \iff \alpha = \frac{\frac{\partial s}{\partial x} f^{-} (x)}{\frac{\partial s}{\partial x}(f^{-}(x) - f^{+}(x))} \end{aligned}\]2. Equivalent Control Method
시스템을 평면 위에 유지시키기 위해 필요한 가상의 연속 제어 입력 \(u_{eq}\) 를 도출하는 방식이다.
\[\begin{aligned} \text{ for } \dot{x} = f(x) + G(x)u : \\ \text{ find } u_{eq} \text{ such that } s(x) = 0 \text{ and } \dot{s}(x) = 0 . \\ \\ \implies \dot{x}_{eq} = f(x_{eq}) + G(x_{eq}) u_{eq} \\ \text{ and } u_{eq} = - \bigg( \frac{\partial s(x)}{\partial x} G(x) \bigg)^{-1} L_f s(x) \end{aligned}\]Example: Linear Oscillator
선형 발진기에서는, \(s = x_1 + k x_2\) 형태의 Switching line 을 설정해서 분석한다.
파라미터 \(k\) 의 값에 따라, 시스템은 Nonlinear continuous oscillation (\(k=0\)), Unstable movement (\(k <0\)), or Convergence to EP (\(k >0\)) 등의 형태를 가진다.
Continuous Approximation
Chattering 을 억제하기 위해 Signum function 대신 Continuous approximation 을 사용하기도 한다.
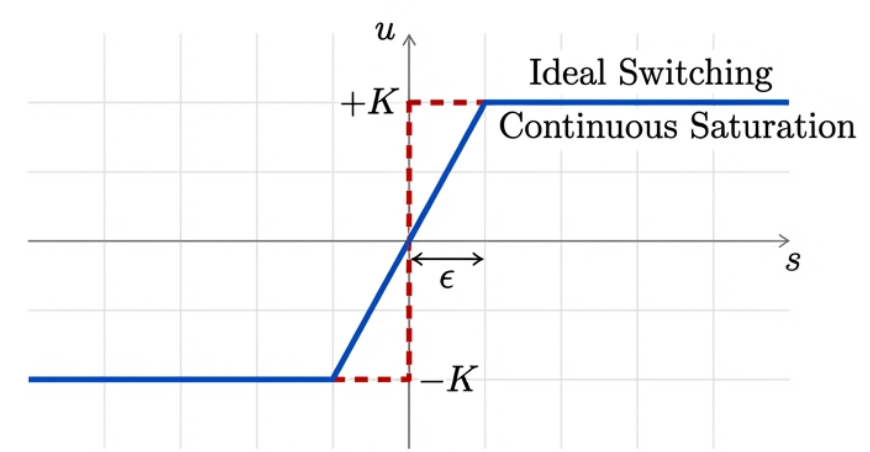
특정 경계층(\(\epsilon\)) 내에서 제어의 입력을 linear 하게 만드는 방법으로
\[u(x) = -K sat \bigg( \frac{s(x)}{\epsilon} \bigg)\]이 형태를 따른다. 이렇게 되면,
- Region \(\lvert s \rvert > \epsilon : u = -K\) - Reaching Phase
- Region \(\lvert s \rvert \leq \epsilon : u = - \frac{K}{\epsilon} s\) - Linear High-Gain
이렇게 두 가지로 나눌 수 있다. 이 방식은 Chattering 을 줄여주지만, 상태를 \(s=0\) 에 완전히 고정시키는 대신 평면 근처의 일정한 Neighborhood 내로 수렴시키는 특성을 가진다.