Robotics 01: Rigid Body Kinematics 기초
로보틱스 강의 첫 번째 내용 정리. Rigid Body Kinematics의 기본 가정부터 Rodrigues 회전 공식까지.
로보틱스 강의 첫 번째 내용 정리. Rigid Body Kinematics의 기본 가정부터 Rodrigues 회전 공식까지.
1. Assumptions (가정)
1-1. Rigid Body vs Elastic Body
로봇 링크를 모델링할 때 rigid body(강체) 를 가정한다.
 그림 1. Rigid body는 두 점 사이 거리가 항상 일정하고, elastic body는 힘에 의해 변형된다.
그림 1. Rigid body는 두 점 사이 거리가 항상 일정하고, elastic body는 힘에 의해 변형된다.
- Rigid body: 어떤 두 점 사이의 거리가 운동 중에도 변하지 않음 \(|P - Q| = \text{const} \quad \forall\, t\)
- Elastic body: 힘이 가해지면 형상이 변형됨 → 유연 로봇팔 등에서 고려
강체 가정 덕분에 링크 하나의 자세(pose)를 6 DOF (position 3 + orientation 3)로 완전히 기술 가능.
1-2. Earth-Fixed Inertial Frame
지구에 고정된 기준 좌표계를 관성계(inertial frame) 로 가정:
\[\mathbf{v}_{\text{earth}} = 0, \quad \boldsymbol{\omega}_{\text{earth}} = 0\]지구 자전 효과는 로봇 스케일에서 무시 가능 → Newton 2nd law를 fictitious force 없이 그대로 적용.
2. Vectors and Representation
2-1. Observation
점 P의 위치벡터와 속도:
\[\vec{r}_{OP} = \vec{r}_P, \qquad \vec{V}_P = \frac{d}{dt}\vec{r}_P = \lim_{dt\to 0}\frac{\vec{r}_P(t+dt)-\vec{r}_P(t)}{dt}\]2-2. Representation
벡터 $\vec{V}_P$를 좌표계 $b$의 기저벡터로 분해하면:
\[\vec{V}_P = x_{vb}\,\vec{e}_{x_b} + y_{vb}\,\vec{e}_{y_b} + z_{vb}\,\vec{e}_{z_b}\]숫자 표현(representation):
\[{}^b V_P = \begin{bmatrix} x_{vb} \\ y_{vb} \\ z_{vb} \end{bmatrix} \quad \leftarrow \text{representation of } \vec{V}_P \text{ in coord. sys. } b\]핵심: 벡터 자체는 좌표계와 무관. 숫자 표현만 프레임에 따라 달라진다.
3. Base Transformation — Rotation Matrix
 그림 2. 같은 벡터를 Frame 0, i, b에서 표현할 때 rotation matrix로 변환한다. 역변환은 transpose.
그림 2. 같은 벡터를 Frame 0, i, b에서 표현할 때 rotation matrix로 변환한다. 역변환은 transpose.
같은 벡터 $\vec{r}_{PQ}$를 Frame 1과 Frame 2에서 각각 표현하면:
\[{}_{1}r_{PQ} = \begin{bmatrix}x_1\\y_1\\z_1\end{bmatrix}, \qquad {}_{2}r_{PQ} = {}_{2}A_1 \cdot {}_{1}r_{PQ} = \begin{bmatrix}x_2\\y_2\\z_2\end{bmatrix}\]Rotation matrix ${}_{2}A_1$의 열(column)은 Frame 1의 기저벡터를 Frame 2로 표현한 것:
\[{}_{2}A_1 = \begin{bmatrix} \mid & \mid & \mid \\ {}_{2}e_{x_1} & {}_{2}e_{y_1} & {}_{2}e_{z_1} \\ \mid & \mid & \mid \end{bmatrix}\]4. Properties of Rotation Matrices
| 성질 | 수식 |
|---|---|
| 체인 곱 | ${}{1}A_3 = {}{1}A_2 \cdot {}_{2}A_3$ |
| 비교환 | ${}{1}A_2 \cdot {}{2}A_3 \neq {}{2}A_3 \cdot {}{1}A_2$ |
| 역행렬 = Transpose | ${}{2}A_1^{-1} = {}{2}A_1^T = {}_{1}A_2$ |
| 길이 불변 | $|{}{1}r| = |{}{2}r|$ |
5. Euler’s Rotation Theorem
임의의 3D 회전은 어떤 하나의 축 $\vec{n}$ 주위로 각도 $\varphi$ 만큼 회전한 것으로 표현 가능하다.
- $\vec{n}$: 회전축 (unit vector), 회전 전후 불변
- $\varphi$: 회전 각도
6. Rodrigues’ Rotation Formula
6-1. 벡터 분해
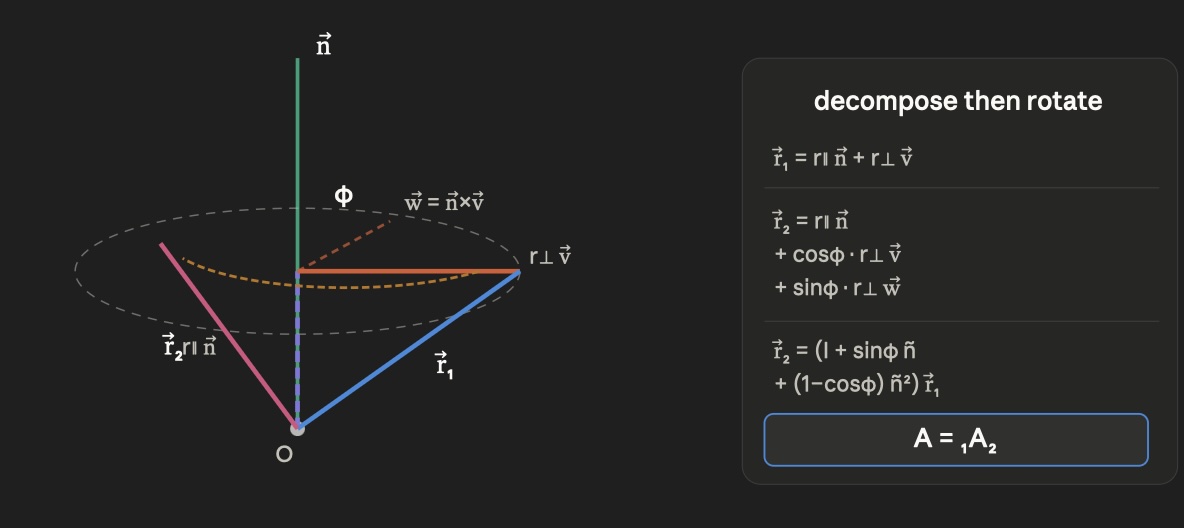
 그림 3. r1을 축 방향(평행) 성분과 수직 성분으로 분해. 평행 성분은 불변, 수직 성분만 phi만큼 회전.
그림 3. r1을 축 방향(평행) 성분과 수직 성분으로 분해. 평행 성분은 불변, 수직 성분만 phi만큼 회전.
벡터 $\vec{r}_1$을 $\vec{n}$ 기준으로 분해:
\[\vec{r}_1 = r_\parallel \vec{n} + r_\perp \vec{v}\]- $r_\parallel \vec{n}$: 축 방향 성분 → 회전해도 불변
- $r_\perp \vec{v}$: 수직 성분 → $\varphi$ 만큼 회전
6-2. 유도
회전 후:
\[\vec{r}_2 = r_\parallel \vec{n} + \cos\varphi\, r_\perp \vec{v} + \sin\varphi\, r_\perp \vec{w}\]여기서 $\vec{w} = \tilde{n}\vec{r}_1 = \vec{n} \times \vec{r}_1$.
정리하면:
\[\boxed{{}_{1}A_2 = I + \sin\varphi\,\tilde{n} + (1-\cos\varphi)\,\tilde{n}^2}\]6-3. 다른 버전 ($\tilde{n}^2 = nn^T - I$ 활용)
\[\boxed{{}_{1}A_2 = nn^T + \cos\varphi\,(I - nn^T) + \sin\varphi\,\tilde{n}}\]| 항 | 의미 |
|---|---|
| $nn^T$ | 축 방향 투영 — 불변 성분 |
| $\cos\varphi\,(I - nn^T)$ | 수직 성분 × cosφ |
| $\sin\varphi\,\tilde{n}$ | 수직 성분 × sinφ (90° 방향) |
6-4. $\tilde{n}$ vs $nn^T$
| 표기 | 의미 | 크기 |
|---|---|---|
| $\vec{n}\vec{n}^T$ | outer product | 3×3 |
| $\tilde{n}$ | cross product matrix ($\tilde{n}\vec{r} = \vec{n}\times\vec{r}$) | 3×3 |
$\tilde{n}$의 정의:
\[\tilde{n} = \begin{bmatrix}0&-n_z&n_y\\n_z&0&-n_x\\-n_y&n_x&0\end{bmatrix}\]$\tilde{n}^2 = nn^T - I$는 정의가 아니라 계산으로 증명되는 항등식.
6-5. 예시 — x축 회전
그림 4. x축 회전에서 φ를 바꾸면 행렬 원소와 y-z 평면 벡터가 어떻게 달라지는지 보여준다.
$\vec{n} = [1,0,0]^T$ 대입:
\[\tilde{n} = \begin{bmatrix}0&0&0\\0&0&-1\\0&1&0\end{bmatrix}, \qquad \tilde{n}^2 = \begin{bmatrix}0&0&0\\0&-1&0\\0&0&-1\end{bmatrix}\] \[{}_{1}A_2 = \begin{bmatrix}1&0&0\\0&\cos\varphi&-\sin\varphi\\0&\sin\varphi&\cos\varphi\end{bmatrix} \checkmark\]7. Difference Velocities (상대속도 표기법)
 그림 5. Body 0(지구) → Body 1(기차) → Body 2(자동차)의 속도 체인. 절대속도는 차이속도의 합.
그림 5. Body 0(지구) → Body 1(기차) → Body 2(자동차)의 속도 체인. 절대속도는 차이속도의 합.
표기 규칙: ${}{frame}\mathbf{v}{body}$
| 위치 | 의미 |
|---|---|
| 아래 왼쪽 | 어느 좌표계에서 표현 |
| 아래 오른쪽 | 어느 body의 속도 |
절대속도는 difference velocity의 합:
\[{}_{0}\mathbf{v}_{02} = {}_{0}\mathbf{v}_{01} + {}_{0}\mathbf{v}_{12} = {}_{0}\mathbf{v}_{1} + {}_{0}\mathbf{v}_{12}\]이 chain rule이 kinematic chain의 핵심.