3D Computer Vision 정리 — Ch3. 원근 투영(Perspective Projection)
Prof. Dr. Daniel Cremers (TUM)의 3D Computer Vision 강의 3장 정리. “3차원 세계의 점이 어떻게 2차원 이미지의 픽셀(pixel)이 되는가?”를 수학적으로 완전히 기술하는 것이 이 장의 목표다.
0. 이 장의 큰 그림
3장은 다음 순서로 진행된다: ① 역사 ② 수학적 표현(mathematical representation) ③ 내부 파라미터(intrinsic parameters) ④ 구면 투영(spherical projection) ⑤ 방사 왜곡(radial distortion) ⑥ 프리이미지/코이미지(preimage/coimage) ⑦ 사영 기하(projective geometry).
핵심 결론을 먼저 박아두자. 세계 좌표 $\boldsymbol{X}_0$ 에서 픽셀 좌표 $\boldsymbol{x}’$ 까지의 전체 변환은
\[\lambda\,\boldsymbol{x}' = K\,\Pi_0\,g\,\boldsymbol{X}_0\]한 줄로 요약된다. 이 글은 이 식을 처음부터 끝까지 쌓아 올린다.
1. 역사적 배경 (Historic Remarks)
영상 형성(image formation)의 기하학은 멀리 유클리드(Euclid, 기원전 4세기) 까지 거슬러 올라가고, 폼페이(Pompeii) 벽화에 부분적으로 올바른 원근법이 보인다. 로마 제국 멸망과 함께 사라졌다가 약 1000년 뒤 르네상스(Renaissance) 미술에서 다시 등장한다. 브루넬레스키(Brunelleschi), 도나텔로(Donatello), 알베르티(Alberti)가 대표 주자이며, 최초의 투영 이론서 Della Pittura(1435)는 알베르티(Leon Battista Alberti) 가 썼다.
라파엘로의 아테네 학당, 뒤러의 기계(Dürer’s machine, 1525), 호가스(Hogarth)의 풍자화, 에셔(Escher)의 작품들은 한 가지를 말한다: 올바른 원근법이란 “눈(중심점)에서 물체로 직선을 긋고, 그 직선이 화면과 만나는 곳에 점을 찍는 것” 이다. 특히 뒤러의 기계는 실(끈)이 광선(ray)을 그대로 흉내 내는 장치로, 다음에 볼 핀홀 카메라 모델 그 자체다.
2. 핀홀 카메라와 원근 투영의 수학
2.1 핀홀 카메라 (The Pinhole Camera)
핀홀 카메라는 작은 구멍(pinhole) 하나로 빛을 통과시키는 가장 단순한 카메라다. 물체에서 나온 광선이 구멍을 지나 뒷벽에 거꾸로 상을 맺는다. 이 “구멍 = 광학 중심(center of projection)”이 모든 광선이 모이는 한 점이다.
핵심 아이디어: 3D 점 → 광학 중심을 잇는 직선 → 그 직선이 상면(image plane)과 만나는 점 = 이미지 점.
2.2 부호 뒤집기와 투영식
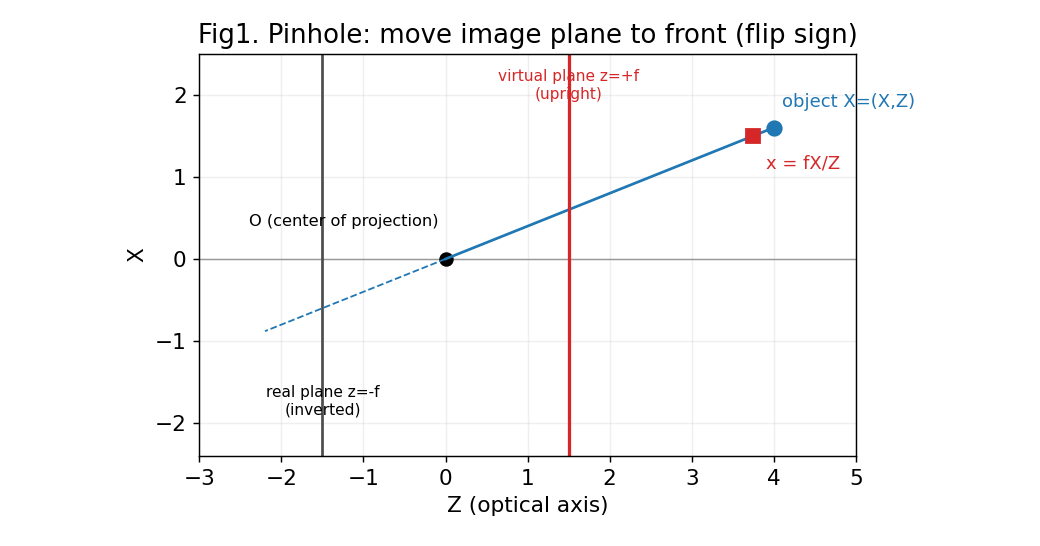 상면을 광학 중심 앞으로 옮겨(부호 뒤집기) 상을 똑바로 세운다.
상면을 광학 중심 앞으로 옮겨(부호 뒤집기) 상을 똑바로 세운다.
실제 핀홀에서는 상이 구멍 뒤(z = −f) 에 거꾸로 맺힌다. 수식에 마이너스가 붙어 번거로우므로, 관례적으로 $x,y$ 축 부호를 뒤집어 상면을 중심 앞(z = +f) 에 둔다. 기하적으로 완전히 동일한 모델이다.
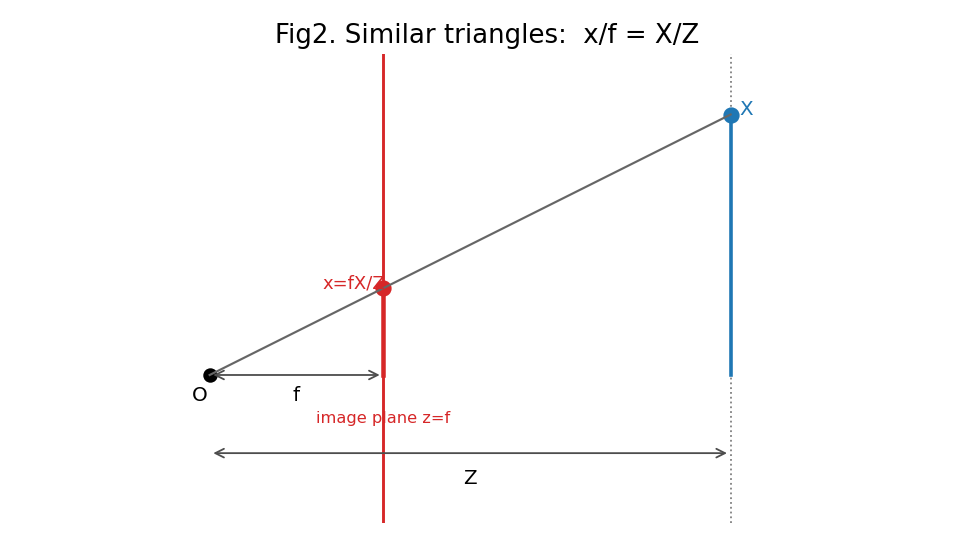 닮은 삼각형(similar triangles)에서 곧바로 투영식이 나온다.
닮은 삼각형(similar triangles)에서 곧바로 투영식이 나온다.
닮은 삼각형에서 큰 삼각형(밑변 $Z$, 높이 $X$)과 작은 삼각형(밑변 $f$, 높이 $x$)이 닮았으므로
\[\frac{x}{f}=\frac{X}{Z}\quad\Longrightarrow\quad x=f\,\frac{X}{Z}.\]따라서 원근 변환(perspective transformation) $\pi$ 는
\[\pi:\mathbb{R}^3\to\mathbb{R}^2,\qquad \boldsymbol{X}\mapsto\boldsymbol{x}=\pi(\boldsymbol{X})= \begin{pmatrix} f\dfrac{X}{Z}\\[2ex] f\dfrac{Y}{Z}\end{pmatrix}.\]직관: 분모에 깊이 $Z$ 가 들어가는 것이 원근법의 전부다. 멀수록 작게 보이고, 이 $Z$ 로 나누는 행위가 비선형(nonlinear)이라 다루기 까다롭다. 그래서 동차좌표로 이를 “선형처럼” 만든다.
3. 이상적 원근 카메라 (Ideal Perspective Camera)
3.1 동차좌표로 선형화
$Z$ 로 나누는 비선형 연산을, 동차좌표(homogeneous coordinates)에서는 양변에 $Z$ 를 곱한 선형식으로 숨길 수 있다.
\[Z\boldsymbol{x}=Z\begin{pmatrix}x\\y\\1\end{pmatrix} =\begin{pmatrix}f&0&0&0\\0&f&0&0\\0&0&1&0\end{pmatrix} \begin{pmatrix}X\\Y\\Z\\1\end{pmatrix} =K_f\,\Pi_0\,\boldsymbol{X}.\]두 행렬을 정의한다.
\[K_f\equiv\begin{pmatrix}f&0&0\\0&f&0\\0&0&1\end{pmatrix},\qquad \Pi_0\equiv\begin{pmatrix}1&0&0&0\\0&1&0&0\\0&0&1&0\end{pmatrix}.\]- $K_f$ : 초점거리(focal length) $f$ 만 담은 행렬.
- $\Pi_0$ : 표준 투영 행렬(standard projection matrix) — 4D 점에서 4번째 성분을 떼어내 3D로 만드는 “잘라내기”.
깊이 $Z$ 를 미지의 상수 $\lambda>0$ 로 두면
\[\lambda\,\boldsymbol{x}=K_f\,\Pi_0\,\boldsymbol{X}.\]이 $\lambda$ 가 우리가 모르는 스케일(scale)이다. “$=$”처럼 보여도 사실은 “스케일 차이를 빼면 같다”는 뜻임을 기억하자.
3.2 카메라의 강체 운동 (Rigid Motion)
지금까지 $\boldsymbol{X}$ 는 카메라 좌표(camera coordinates) 였다. 물체는 보통 세계 좌표(world coordinates) $\boldsymbol{X}_0$ 로 주어지고, 카메라는 세계 속에서 회전·이동(강체 운동, rigid motion)을 한다.
\[\boldsymbol{X}=R\boldsymbol{X}_0+T \qquad\Longleftrightarrow\qquad \boldsymbol{X}=g\,\boldsymbol{X}_0=\begin{pmatrix}R&T\\0&1\end{pmatrix}\boldsymbol{X}_0,\quad g\in SE(3).\]여기서 $R$ 은 회전(rotation), $T$ 는 평행이동(translation), $g$ 는 강체변환(rigid-body transformation)이다. 끼워 넣으면 세계 → 이미지 전체 변환이 완성된다.
\[\lambda\,\boldsymbol{x}=K_f\,\Pi_0\,g\,\boldsymbol{X}_0.\]$f$ 를 알면 이미지 좌표 단위를 바꿔 $f=1$ 로 정규화(normalize)할 수 있고, 그러면 더 깔끔해진다.
\[\lambda\,\boldsymbol{x}=\Pi_0\,\boldsymbol{X}=\Pi_0\,g\,\boldsymbol{X}_0.\]4. 내부 파라미터 (Intrinsic Parameters)
4.1 실제 카메라가 추가하는 세 가지
이상적 카메라에 실제 센서는 세 가지를 더한다.
- 주점 이동(principal point offset) $o_x,o_y$ — 이미지 원점이 보통 왼쪽 위 모서리라 평행이동 필요.
- 픽셀 스케일 $s_x,s_y$ — 픽셀이 미터가 아니므로 단위 변환(정사각형이 아닐 수 있음).
- 스큐(skew factor) $s_\theta$ — 픽셀의 가로·세로축이 직각이 아닐 때의 비틂.
순서는 “투영($\Pi_0$, $f=1$ 기준) → 센서·픽셀 변환($K_sK_f$)”이다.
4.2 내부 파라미터 행렬 $K$ 와 일반 투영 행렬
\[K\equiv K_sK_f= \begin{pmatrix}fs_x&fs_\theta&o_x\\0&fs_y&o_y\\0&0&1\end{pmatrix}.\]세계 좌표의 함수로 전체를 쓰면
\[\lambda\,\boldsymbol{x}'=K\,\Pi_0\,\boldsymbol{X}=K\,\Pi_0\,g\,\boldsymbol{X}_0\equiv\Pi\,\boldsymbol{X}_0,\]여기서 정의되는 $3\times4$ 행렬
\[\Pi\equiv K\,\Pi_0\,g=(KR,\;KT)\]가 일반 투영 행렬(general projection matrix) 이다. 카메라 한 대를 완전히 기술하는 핵심 행렬이다.
선형처럼 보여도 스케일 $\lambda$ 가 살아 있다. $\lambda$ 로 나누면 비선형 형태가 드러난다.
\[x'=\frac{\pi_1^{\top}\boldsymbol{X}_0}{\pi_3^{\top}\boldsymbol{X}_0},\qquad y'=\frac{\pi_2^{\top}\boldsymbol{X}_0}{\pi_3^{\top}\boldsymbol{X}_0},\qquad z'=1,\]$\pi_1^{\top},\pi_2^{\top},\pi_3^{\top}\in\mathbb{R}^4$ 은 $\Pi$ 의 세 행(row)이다. 분모 $\pi_3^{\top}\boldsymbol{X}_0$ 가 깊이 $\lambda$ 역할을 한다 — “$Z$ 로 나누기”가 그대로 살아 있는 셈이다.
4.3 $K$ 성분의 물리적 의미
| 성분 | 의미 |
|---|---|
| $o_x$ | 주점(principal point)의 $x$ 좌표(픽셀) |
| $o_y$ | 주점의 $y$ 좌표(픽셀) |
| $fs_x=\alpha_x$ | 단위 길이의 가로 방향 픽셀 크기 |
| $fs_y=\alpha_y$ | 단위 길이의 세로 방향 픽셀 크기 |
| $\alpha_x/\alpha_y$ | 종횡비(aspect ratio) $\sigma$ |
| $fs_\theta$ | 픽셀 스큐(skew), 보통 0에 가까움 |
요즘 카메라는 픽셀이 거의 정사각형이라 $s_\theta\approx0$, $\alpha_x\approx\alpha_y$ 인 경우가 많아 $K$ 는 사실상 $f,o_x,o_y$ 세 숫자로 줄어든다.
5. 구면 투영 (Spherical Projection)
| 지금까지는 평면(planar) 상면이었다. 어안렌즈처럼 화각이 넓으면 단위 구(unit sphere) $\mathbb{S}^2\equiv{x\in\mathbb{R}^3\mid | x | =1}$ 위로 투영하는 게 자연스럽다. |
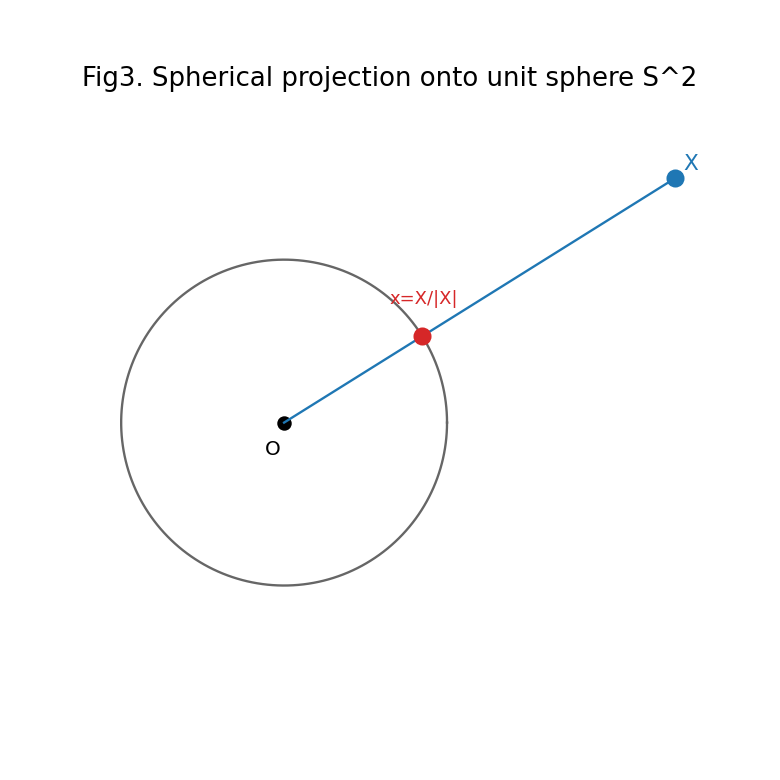 3D 점을 광선 방향으로 단위 구 표면까지 끌어당긴다.
3D 점을 광선 방향으로 단위 구 표면까지 끌어당긴다.
픽셀 좌표 식은 평면일 때와 형태가 똑같고 스케일만 바뀐다.
\[\lambda\,\boldsymbol{x}'=K\,\Pi_0\,g\,\boldsymbol{X}_0,\qquad \text{이번엔}\quad\lambda=|\boldsymbol{X}|=\sqrt{X^2+Y^2+Z^2}.\]| 평면이면 $\lambda=Z$, 구면이면 $\lambda= | \boldsymbol{X} | $ 인 것이 유일한 차이다. 그래서 “스케일 차이만 빼면 같다”는 동치 기호 $\sim$ 를 도입한다. |
통찰: 광선이 상면(어떤 모양이든)과 만나기만 하면 이 관계는 성립한다. 상의 본질은 “광학 중심을 지나는 광선의 방향”이고, 상면이 평면이냐 구면이냐는 그 방향에 어떤 좌표를 붙이느냐의 문제일 뿐이다. 이 생각이 곧 사영 기하로 이어진다.
6. 방사 왜곡 (Radial Distortion)
내부 행렬 $K$ 는 선형(linear) 왜곡만 모델링한다. 싼 웹캠이나 광각렌즈에서는 직선이 휘어 보이는 비선형 방사 왜곡 이 생긴다.
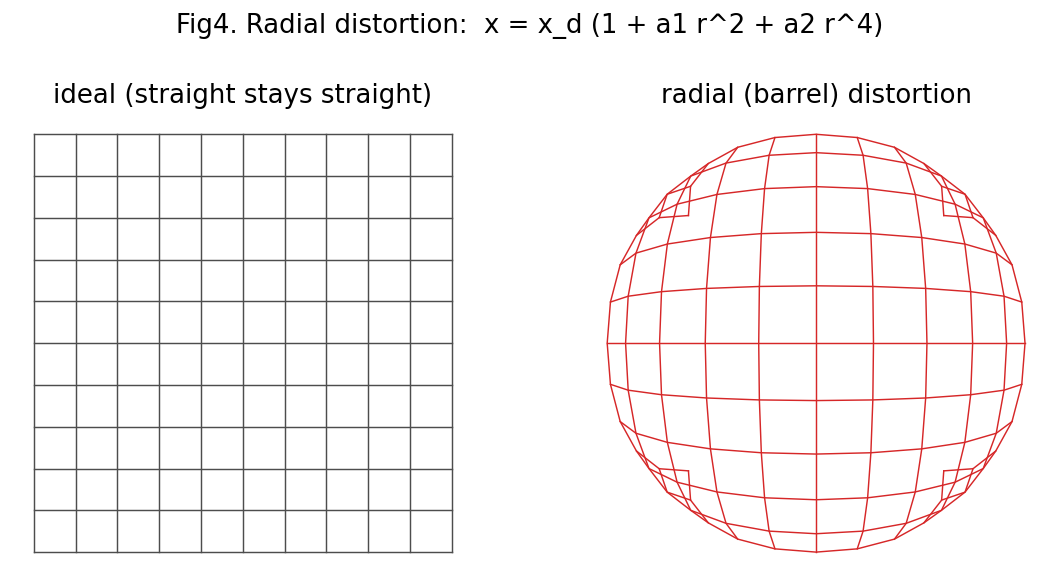 왼쪽(이상적)은 격자가 곧지만, 오른쪽은 가장자리로 갈수록 휜다(barrel).
왼쪽(이상적)은 격자가 곧지만, 오른쪽은 가장자리로 갈수록 휜다(barrel).
간단·효과적 모델(반경 $r$ 의 짝수차 다항식):
\[x=x_d\,(1+a_1r^2+a_2r^4),\qquad y=y_d\,(1+a_1r^2+a_2r^4),\]여기서 $\boldsymbol{x}_d\equiv(x_d,y_d)$ 는 왜곡된 점, $r^2=x_d^2+y_d^2$. 보정판(calibration rig)이 있으면 $a_1,a_2$ 를 추정한다.
더 일반적인 모델(Devernay & Faugeras 1995):
\[\boldsymbol{x}=c+f(r)(\boldsymbol{x}_d-c),\qquad f(r)=1+a_1r+a_2r^2+a_3r^3+a_4r^4,\]| $r= | \boldsymbol{x}_d-c | $ 는 임의의 왜곡 중심(center of distortion) $c$ 까지의 거리, $f(r)$ 은 임의의 4차 보정 함수다. 파라미터는 “직선은 직선으로 보여야 한다”는 제약이나 3D 복원과 동시에 추정한다(Zhang ’96, Stein ’97, Fitzgibbon ’01). |
핵심: 방사 왜곡은 방향과 무관하게 오직 중심으로부터의 거리 $r$ 에만 의존하므로 “radial(방사)”이라 부른다.
7. 프리이미지와 코이미지 (Preimage and Coimage)
이 절은 개념적으로 가장 중요한 부분이다. 스케일 $\lambda$ 가 미지이므로, 3D 점 하나는 이미지의 단일 점이 아니라 ”$\boldsymbol{y}\sim\boldsymbol{x}$ 인 동치류(equivalence class)” 에 대응된다.
7.1 등장인물 정리
3D 직선 $L$ 은 기준점 $\boldsymbol{X}_0$ 과 방향 벡터 $\boldsymbol{V}=(V_1,V_2,V_3,0)^{\top}$ 로 표현된다(4번째 성분 0은 “방향”).
\[\boldsymbol{X}=\boldsymbol{X}_0+\mu\,\boldsymbol{V},\qquad\mu\in\mathbb{R}.\]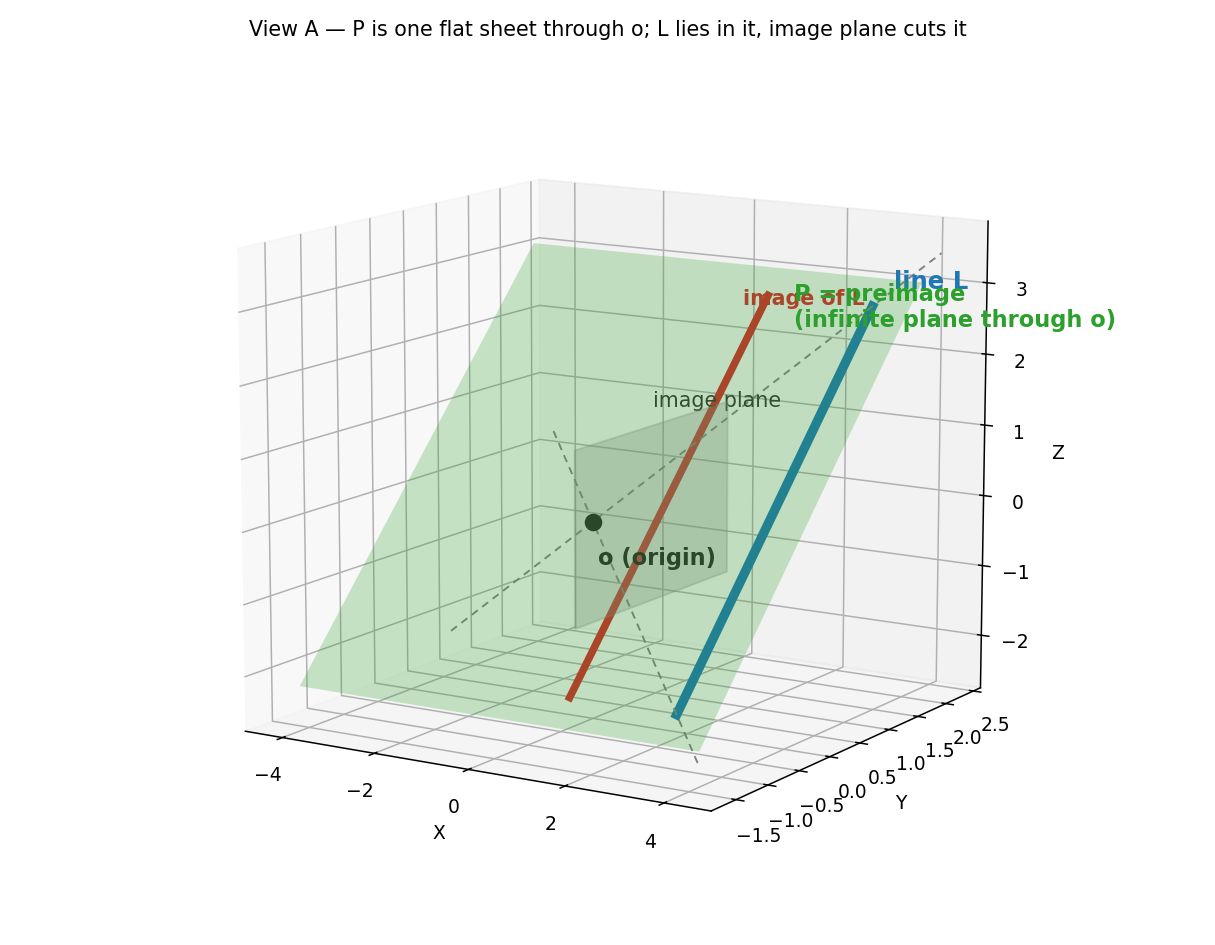 프리이미지 P는 하나의 평평한 시트. 직선 L이 그 위에 있고, 이미지 플레인이 시트를 자른 자리가 L의 상이다.
프리이미지 P는 하나의 평평한 시트. 직선 L이 그 위에 있고, 이미지 플레인이 시트를 자른 자리가 L의 상이다.
- 직선 $L$ = 세계에 실재하는 3D 물체 (철길, 책상 모서리 등).
- 이미지 플레인 = 상이 맺히는 카메라 센서 평면. $o$ 로부터 거리는 초점거리 $f$ 로 고정.
- image of L = 이미지 플레인 위에 찍힌 $L$ 의 2D 상.
- 프리이미지 $P$ = $o$ 를 지나고 $L$ 을 품은 무한 평면. “같은 상을 만들 수 있는 모든 3D 직선의 후보 집합”.
- 코이미지 $\ell$ = 평면 $P$ 의 법선(normal) 1D 직선.
7.2 프리이미지는 왜 “원점을 지나는 무한 평면”인가
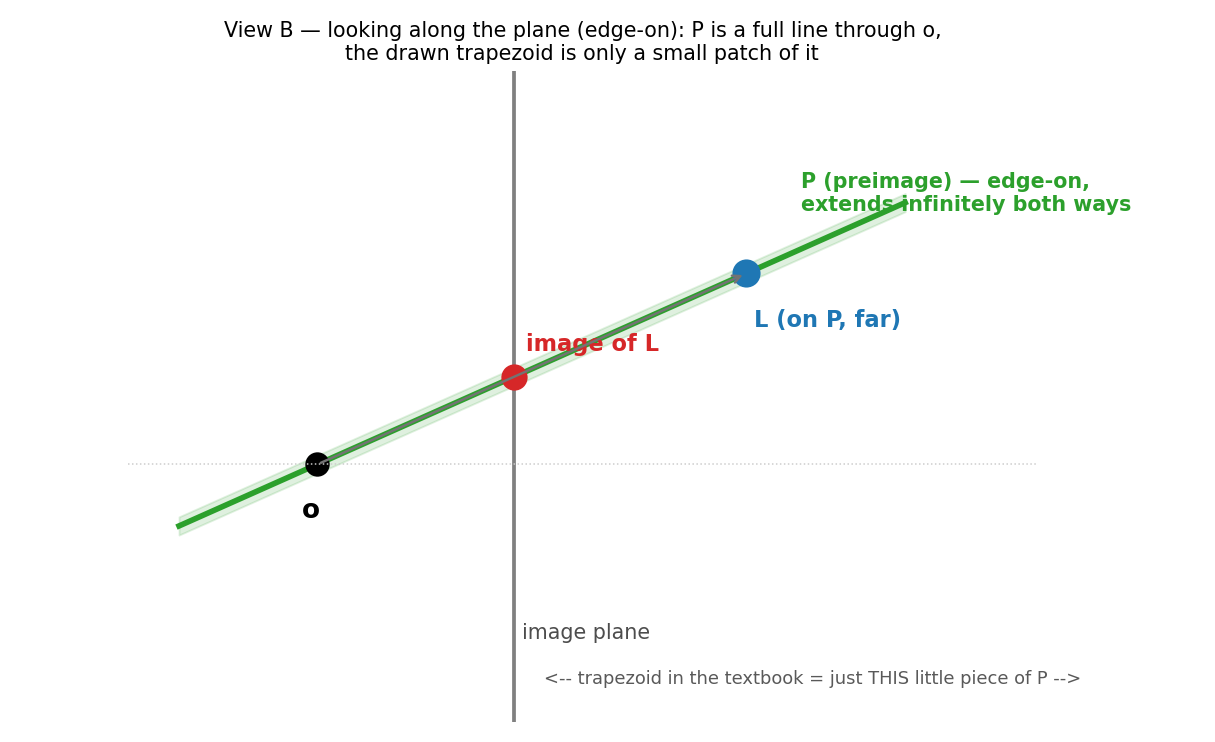 평면 P를 모서리 방향으로 보면 원점 o를 지나는 직선처럼 보인다. 교과서의 사다리꼴은 이 무한 평면의 작은 한 조각일 뿐이다.
평면 P를 모서리 방향으로 보면 원점 o를 지나는 직선처럼 보인다. 교과서의 사다리꼴은 이 무한 평면의 작은 한 조각일 뿐이다.
직선의 상은
\[\boldsymbol{x}\sim\Pi_0\boldsymbol{X}=\Pi_0(\boldsymbol{X}_0+\mu\boldsymbol{V})=\Pi_0\boldsymbol{X}_0+\mu\,\Pi_0\boldsymbol{V}.\]원점 $o$ 에서 본 모든 상의 점 $\boldsymbol{x}$ 들은 2D 부분공간(평면) $P$ 를 이룬다. $P=\text{span(image)}$ 이고, span은 정의상 원점을 포함하며 스칼라배를 모두 포함하므로 무한히 뻗는다. 교과서 그림의 사다리꼴은 이 무한 평면의 일부일 뿐이다.
정의: 점 또는 직선의 프리이미지 = 주어진 상과 똑같은 상을 만드는 3D 점들의 가장 큰 집합(largest set).
7.3 깊이 모호성 — 무엇이 변하고 무엇이 고정인가
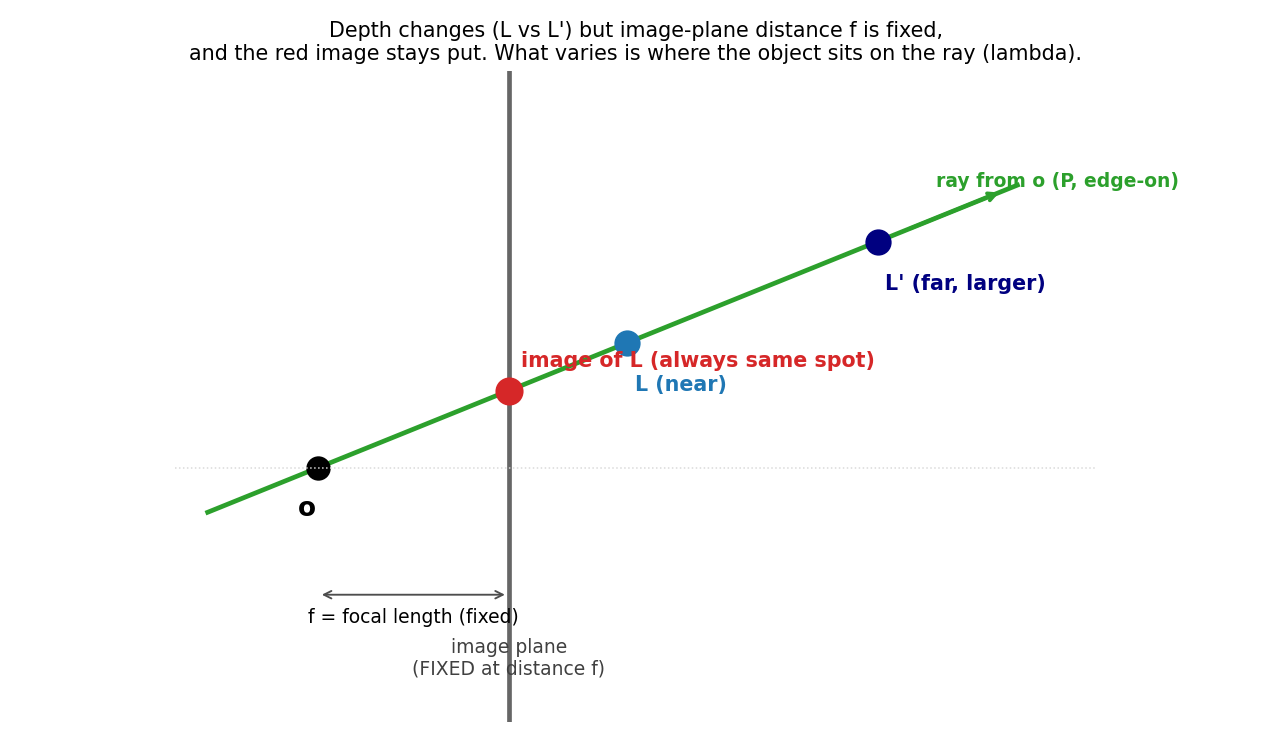 깊이가 달라져도(L vs L’) 이미지 플레인 거리 f는 고정, 빨간 상도 같은 자리. 변하는 것은 물체가 광선 위 어디 있느냐(λ)뿐이다.
깊이가 달라져도(L vs L’) 이미지 플레인 거리 f는 고정, 빨간 상도 같은 자리. 변하는 것은 물체가 광선 위 어디 있느냐(λ)뿐이다.
| 항목 | 깊이에 따라 변하나? |
|---|---|
| $o$ → 이미지 플레인 거리 ($=f$) | ❌ 고정 (카메라 성질) |
| 이미지 플레인 위 상의 위치 | ❌ 같은 광선이면 그대로 |
| 물체가 광선 위 놓인 위치 ($\lambda$) | ✅ 이게 미지수 |
카메라는 깊이 $\lambda$ 를 모르므로 같은 광선 위의 가까운 작은 물체와 먼 큰 물체를 구별하지 못한다. 이 모호성을 한데 모은 것이 프리이미지다.
7.4 코이미지와 핵심 식
점·직선의 프리이미지는 $\mathbb{R}^3$ 의 부분공간이고, 그 직교 여공간(orthogonal complement) 으로도 똑같이 표현할 수 있다. 이 여공간이 코이미지(coimage) 다. 셋은 서로를 유일하게 결정하므로 동등하다.
\[\begin{aligned} \text{image}&=\text{preimage}\cap\text{image plane}, & \text{preimage}&=\text{span(image)},\\[2pt] \text{preimage}&=\text{coimage}^{\perp}, & \text{coimage}&=\text{preimage}^{\perp}. \end{aligned}\]직선 $L$ 의 경우, 프리이미지는 2D 평면, 코이미지는 그 법선 $\ell\in\mathbb{R}^3$ 이다. $P$ 위의 모든 점은 $\ell$ 과 직교하므로 이 장 최고의 식이 나온다.
\[\boxed{\;\ell^{\top}\boldsymbol{x}=0\;}\]상수항이 0이라는 점이 곧 “원점을 지나는 평면”임을 보장한다 — 그래서 사다리꼴이 아니라 무한 평면이다. $\ell$ 에 직교하는 공간은 $\widehat{\ell}$ 의 행으로 생성되므로
\[P=\text{span}(\widehat{\ell}\,).\]여기서 $\widehat{\ell}$ 은 $\ell$ 의 반대칭 행렬(skew-symmetric matrix), 즉 외적을 행렬로 쓴 것이다.
\[\ell=\begin{pmatrix}\ell_1\\[2pt]\ell_2\\[2pt]\ell_3\end{pmatrix} \quad\Rightarrow\quad \widehat{\ell}=\begin{pmatrix}0&-\ell_3&\ell_2\\[2pt]\ell_3&0&-\ell_1\\[2pt]-\ell_2&\ell_1&0\end{pmatrix}, \qquad \widehat{\ell}\,\boldsymbol{v}=\ell\times\boldsymbol{v}.\]$\widehat{\ell}\,\boldsymbol{v}=\ell\times\boldsymbol{v}$ 는 항상 $\ell$ 에 수직이므로 $\widehat{\ell}$ 의 행들이 평면 $P$ 를 생성한다.
점 $p$ 의 경우는 쌍대(dual)다. 프리이미지는 광선(1D 직선), 코이미지는 $\boldsymbol{x}$ 에 직교하는 평면($\widehat{x}$ 의 행으로 생성).
| Image | Preimage | Coimage | |
|---|---|---|---|
| Point | $\text{span}(\mathbf{x})\cap$ im. plane | $\text{span}(\mathbf{x})\subset\mathbb{R}^3$ (직선) | $\text{span}(\widehat{\mathbf{x}})\subset\mathbb{R}^3$ (평면) |
| Line | $\text{span}(\widehat{\boldsymbol{\ell}})\cap$ im. plane | $\text{span}(\widehat{\boldsymbol{\ell}})\subset\mathbb{R}^3$ (평면) | $\text{span}(\boldsymbol{\ell})\subset\mathbb{R}^3$ (직선) |
기억법: 점과 직선은 쌍대다. hat 연산 $\widehat{\cdot}$ 은 “차원을 뒤집어 직교 보를 만드는 스위치”다. 벡터(1D)에 모자를 씌우면 그에 수직인 평면(2D)을 생성한다.
8. 요약 (Summary)
전체 좌표 변환 사슬:
\[\underbrace{\text{4D World}}_{\boldsymbol{X}_0} \xrightarrow{\;g\in SE(3)\;} \underbrace{\text{4D Camera}}_{\boldsymbol{X}} \xrightarrow{\;K_f\Pi_0\;} \underbrace{\text{3D image}}_{} \xrightarrow{\;K_s\;} \underbrace{\text{3D pixel}}_{\boldsymbol{x}'}\]- 외부 파라미터(extrinsic): $g$ — 카메라가 세계 속 어디서 어떻게 보나($R,T$).
- 내부 파라미터(intrinsic): $K=K_sK_f$ — 렌즈·센서·픽셀 성질($f,s_x,s_y,s_\theta,o_x,o_y$).
마스터 공식:
\[\boxed{\;\lambda\,\boldsymbol{x}'=K\,\Pi_0\,g\,\boldsymbol{X}_0\;}\]$\lambda$ 가 바로 미지의 깊이 스케일이다. 이 때문에 한 이미지 점이 광선 전체에 대응하고, 그 모호성을 정리한 개념이 프리이미지(같은 상을 주는 최대 3D 점집합)와 코이미지(그 직교 여공간)였다.
9. 사영 기하 (Projective Geometry)
9.1 왜 필요한가
미지 스케일 $\lambda$ 가 식을 계속 따라다녔다. $\boldsymbol{X}$ 와 $2\boldsymbol{X}$ 는 같은 광선 위라 같은 상을 만든다. 그렇다면 “스케일 차이는 처음부터 무시하자”는 것이 사영 기하의 출발점이다.
3D 점을 $(X,Y,Z,1)$ 로 고정할 필요는 없다. 0 아닌 임의의 $W$ 에 대해
\[\boldsymbol{X}=(XW,\,YW,\,ZW,\,W)\in\mathbb{R}^4\]도 같은 점을 나타낸다 — 중요한 것은 벡터의 방향뿐 이다. 그래서 “동차좌표의 점”을 “원점을 지나는 직선”과 동일시한다.
정의: $n$ 차원 사영공간(projective space) $\mathbb{P}^n$ 은 $\mathbb{R}^{n+1}$ 의 모든 1차원 부분공간(원점을 지나는 직선)의 집합이다.
점 $p\in\mathbb{P}^n$ 은 동차좌표 $\boldsymbol{X}=(x_1,\dots,x_{n+1})^{\top}$ (적어도 한 성분 0 아님)로 표현되고, 임의의 $\lambda\neq0$ 에 대해 $\boldsymbol{Y}=(\lambda x_1,\dots,\lambda x_{n+1})^{\top}$ 는 같은 점 이다($\boldsymbol{X}\sim\boldsymbol{Y}$).
9.2 $\mathbb{P}^2$ 의 두 가지 그림
- 각 점을 2D 구 $\mathbb{S}^2$ 위의 점으로 보되, 대척점(antipodal points)은 같은 점으로 동일시. (구면 투영과 직결: 광선이 구를 두 곳에서 뚫는데 그 둘이 같은 점.)
- 0 아닌 $z$ 성분을 가진 점은 평면 $\mathbb{R}^2$(보통 동차좌표)로, $z=0$ 인 점(무한원점, point at infinity)은 원 $\mathbb{S}^1$($\cong\mathbb{P}^1$)로 본다.
일반화하면 $\mathbb{P}^n$ 은 “$n$ 차원 구 $\mathbb{S}^n$” 또는 “$\mathbb{R}^n$ 에 무한원선(line at infinity) $\mathbb{P}^{n-1}$ 을 붙인 것”으로 볼 수 있다.
왜 결국 중요한가: 유클리드 기하에서 “평행선은 안 만난다”는 골치 아픈 예외다. 사영공간에서는 평행선이 무한원점에서 만난다 고 보아, 평행한 철길이 지평선의 한 점(vanishing point, 소실점)으로 모이는 원근법을 예외 없이 선형대수로 다룰 수 있다. 이 장 전체가 서 있는 수학적 토대가 사영 기하다.
한 장 요약
- 원근 투영의 본질: $x=f X/Z$ — 깊이로 나누기.
- 동차좌표로 비선형을 선형 + 스케일 $\lambda$ 로 분리: $\lambda\boldsymbol{x}=K_f\Pi_0\boldsymbol{X}$.
- 외부 $g$ + 내부 $K$ → 마스터 공식 $\lambda\boldsymbol{x}’=K\Pi_0 g\,\boldsymbol{X}_0$, 일반 투영 행렬 $\Pi=(KR,KT)$.
- $K$ 는 내부 파라미터 6개($f,s_x,s_y,s_\theta,o_x,o_y$)를 담는다.
- 평면이든 구면이든 $\sim$ 로 동등, 실제 렌즈는 방사 왜곡 추가.
- 점·직선의 상 ↔ 프리이미지(평면/직선) ↔ 코이미지(법선), 핵심식 $\ell^{\top}\boldsymbol{x}=0$.
- 모든 것의 토대 = 사영 기하 $\mathbb{P}^n$.